-
multiresolution_demos¶
multiresolution demo¶
|
|
Included are several examples demonstrating multiresolution platform components. The fidelity parameters may be adjusted to demonstrate how the choice of model and scenario results change with fidelity. Included in most is a comparison platform to demonstrate that the behavior is the same when using the same models.
Examples demonstrating multiresolution movers, sensors, comms, processors, fuel, optical signatures, and radar signatures are included. Each scenario is fairly simple to show how a multiresolution component can be set up. The scenarios are intended to illustration multiresolution flexibility, and are not necessarily exquisite examples of how to use each of the constituent models.
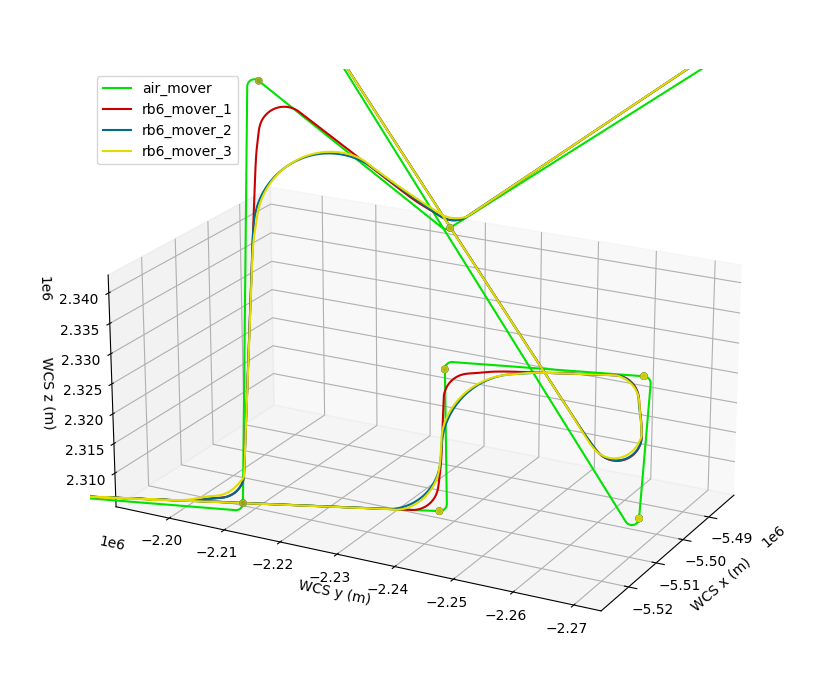
air_mover_demo.txt¶
This example demonstrates a simple use of multiresolution_mover: Two identical mover models (WSF_AIR_MOVER), but with different update intervals. For comparison, a platform that uses WSF_AIR_MOVER is included. The fidelity parameter can be adjusted to choose the model that will be used on the platform. A fidelity value [0,0.5) will choose an WSF_AIR_MOVER with an update interval of 30 seconds and a value in [0.5, 1.0] will choose an AIR_MOVER with an update interval of 0.1 s.
comm_demo.txt¶
This example demonstrates a simple use of multiresolution_comm. Two different comm models can be used (WSF_COMM_TRANSCEIVER or WSF_RADIO_TRANSCEIVER). For comparison, platforms with standard comm models are included as well. In this example the two platforms directly send messages via scripting.
comm_with_command_chain_demo.txt¶
This example demonstrates a slightly more involved use of multiresolution_comm. As in comm_demo.txt, two different comm models can be used (WSF_COMM_TRANSCEIVER or WSF_RADIO_TRANSCEIVER). However, in this demo, a command chain with a network is also used. For comparison, platforms with standard comm models are included as well. In this example a commander platform sends messages to subordinates.
fuel_demo.txt¶
This example demonstrates a simple use of multiresolution_fuel: Two models are included in the multiresolution model, one being a constant rate WSF_FUEL and one being a WSF_TABULAR_RATE_FUEL. For comparison, a platform that uses the same WSF_TABULAR_RATE_FUEL is also included. The fidelity parameter can be adjusted to choose the model that will be used on the platform. A fidelity value in [0,0.5) will choose the constant rate WSF_FUEL model and a value in [0.5, 1.0] will choose the WSF_TABULAR_RATE_FUEL model.
optical_signature_demo.txt¶
This demo adapts the demo in signature_demos to make the fighter platform’s optical signature multiresolution by combining the three optical signatures defined in signature_demos/signatures with multiresolution_optical_signature. It uses the same sensors, but alters the fighter’s route. Varying the fidelity parameter in the platform definition will choose different signatures, with [0-0.33) choosing the spherical signature, [0.33-0.66) choosing the box signature, and [0.66-1.0] the multi-shape signature.
processor_demo.txt¶
This example demonstrates a simple use of multiresolution_processor. Two different implementations of a WSF_TASK_PROCESSOR are included as options in a multiresolution_processor model. One model simply sets the achilles platform to go to a given location at a given speed. The other sets the achilles platform to advance to the location at which it detected the tortoise platform indefinitely.
processor_with_link_demo.txt¶
This example demonstrates a simple use of multiresolution_processor in which internal links are used. Two WSF_SCRIPT_PROCESSOR models are included which have different implementations. Two platforms send messages to each other over a comm, and messages are routed to the script processor.
radar_signature_demo.txt¶
Similar to optical_signature_demo, this demonstrates the usage of multiresolution_radar_signature. An air platform with a multiresolution_radar_signature is used with two signature options, a constant signature and a tabular signature. Two ground-based radars track the air platform. The fidelity parameter may be adjusted to choose the signature.
sensor_demo.txt¶
This example demonstrates a simple use of multiresolution_sensor. Two different sensor models are used (WSF_IRST_SENSOR and WSF_GEOMETRIC_SENSOR). For comparison, a platform with a standard WSF_GEOMETRIC_SENSOR is included as well. An air-based platform flies past the ground-based sensor sites and events are recorded for detection attempts, and tracks initiated, updated, and dropped.
space_mover_demo.txt¶
This example demonstrates a simple use of multiresolution_mover. Two different mover models are used (WSF_SPACE_MOVER and WSF_INTEGRATING_SPACE_MOVER). For comparison, a platform that uses WSF_SPACE_MOVER is included. The fidelity parameter can be adjusted to choose the model that will be used on the platform.