-
noise_cloud¶
noise_cloud demo¶
|
|
This demonstrates the use of WSF_NOISE_CLOUD. It defines a noise
cloud layer and uses it to affect detections of an air target from
a radar. This demo uses sensorplot.
noise_cloud.txt
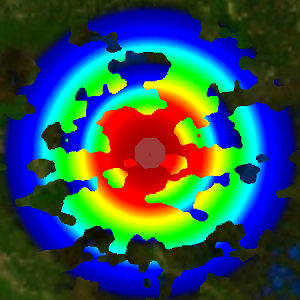
We generate a horizontal map of probability of detection around a radar.
The cloud layer is defined, and is given a sensor_modifier. The sensor
uses this modifier with the modifier_category command in its definition.
Adjust the values in the noise_cloud to see how they affect the structure
of the cloud layer.
outputnoise_cloud.tiff
This is the output that will be generated after executing with sensor_plot.
It may be viewed in wizard by double-clicking on it in the project browser.