WsfZoneRouteFinder¶
-
WsfZoneRouteFinder inherits WsfObjectConstruction:
WsfZoneRouteFinder newObj = WsfZoneRouteFinder();
Overview¶
Use the WsfZoneRouteFinder in script to find a safe route around any number and combination of polygonal lat/lon zones. The WsfZoneRouteFinder works in the general case, meaning that zones can be overlapping, containing, or disjoint and a route is still found if at all possible.
Methods¶
- void AvoidZone(string aZoneName)¶
Tell the zone route finder to avoid a particular zone. You can provide the zone name or a zone object.
Note
All zones must be polygonal lat/lon zones.
- int NumberOfAvoidanceZones()¶
Returns the number of avoidance zones.
- WsfZone GetAvoidanceZone(int aIndex)¶
Returns a copy of the entry at the specified aIndex in the list of avoidance zones, if aIndex is in the valid range; otherwise returns a null reference.
- void ClearAvoidanceZones ()¶
Clear all previously defined avoid zone commands from the zone route finder.
- WsfRoute RouteAroundZones(WsfGeoPoint aStart, WsfGeoPoint aEnd, double speed)¶
Computes the best (shortest) route around all avoidance zones and returns it. If either the starting or ending locations are contained within an avoidance zone, then finder intelligently shifts those points to nearby locations outside the zones. If the route is somehow impossible (start and end are cut off from each other or surrounded) then the route returned will be empty.
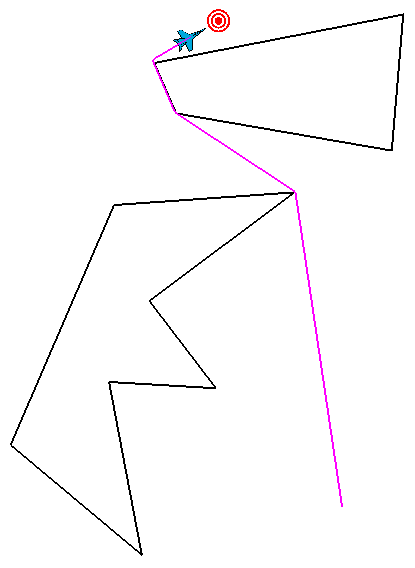
Example¶
This example has “player-1” use a WsfRouteFinder to route to the “target” platform while avoiding two static regions.
end_time 1200 sec
dis_interface record zone_route_finder_1.rep end_dis_interface
zone crown_zone
polygonal
lat_lon
point 15:18:03.43s 47:42:50.48e
point 14:21:32.73s 48:08:10.60e
point 14:18:34.83s 48:51:40.79e
point 14:44:05.75s 48:16:38.58e
point 15:04:40.66s 48:32:42.78e
point 15:03:11.55s 48:06:50.11e
point 15:44:09.04s 48:14:38.06e
end_zone
zone poly_zone
polygonal
lat_lon
point 13:48:11.27s 48:17:54.76e
point 13:36:43.68s 49:17:45.98e
point 14:08:43.62s 49:15:04.57e
point 14:00:02.04s 48:23:11.21e
end_zone
platform target WSF_PLATFORM
side red
icon bullseye
position 13:38:39s 48:33:24e altitude 20000 ft
end_platform
platform router WSF_PLATFORM
side blue
icon F-18
add mover WSF_AIR_MOVER
at_end_of_path stop
end_mover
route
position 15:31:04s 49:02:50e altitude 35000 ft msl speed 250 m/s
end_route
on_initialize2
WsfZoneRouteFinder finder = WsfZoneRouteFinder();
finder.AvoidZone("crown_zone"); #avoid zone by name
WsfZone polyZone = WsfZone.FindZone("poly_zone");
finder.AvoidZone(polyZone); #avoid zone by script object
WsfGeoPoint tgt = WsfSimulation.FindPlatform("target").Location();
WsfRoute path = finder.RouteAroundZones(PLATFORM.Location(), tgt, 250);
finder.DrawAvoidances(1200,Vec3.Construct(0,0,0));
finder.DrawGraph(200,Vec3.Construct(0,0.8,0));
PLATFORM.SetRoute(path);
end_on_initialize2
end_platform